
对石油人来说,“找油”是根本,无论过去还是现在,如何将储藏在石缝里、海洋里、陆地深层的油气“挤”出来,始终是一个世界级难题。攻克这些难题,需要不同学科、多个团队协同作战。......
真人版“机甲战士”为国出征,桂冠背后另有天地
来源:互联网
2024-11-12 00:19:24 版权归原作者所有,如有侵权,请联系我们
暑往寒来,巴黎奥运赛事燃情了整个夏天,经久不散。但鲜少有人知道,接棒此盛事,另有一项特殊的奥运会在瑞士按部就班地开展,即“全球辅助技术奥运会”(又称“半机械人仿生奥运会”)。这是由瑞士苏黎世联邦理工学院创立的非营利性项目,是一项针对残障人士与先进科技辅助设备结合的国际性赛事。不同于竞技体育,此项赛事的参赛运动员更像是科技装置的操纵者而非运动员,全程必须使用辅助性的机械动力装置来完成比赛,只因赛事宗旨便是促进帮助残障人士辅具技术发展和产业化加速,让更多残障人士受益于科技进步带来的便利。
虽然比赛创办时间尚短且还不闻于世,但业内却已有许多有识之士将亮相于此赛事作为自己职业生涯的重要目标,东南大学和中国科学院苏州生物医学工程技术研究所的“90后”科研团队便是如此。而这些年轻人无疑都是甘于拼搏且无比幸运的,在数日前落下帷幕的第三届大赛中,与他们一直并肩作战的台前伙伴——来自苏州的参赛残疾人选手徐敏,经过两天三轮的预赛、决赛比拼,最终以90分的优异成绩战胜法国队和意大利队,荣获大赛“上肢义肢”组冠军。

第三届全球辅助技术奥运会中国代表团留影
毫不夸张地说,这是赛事中竞争最为激烈的组别之一。选手们要一次性完成义肢提重物、双臂协作、精细物体抓取、盲盒抓取等10个义肢操作任务,以任务完成数量和完成时间判定成绩。此次摘得桂冠的中国代表团,仅由7人组成,除了参赛选手徐敏,有5位科研人员都来自东南大学机器人传感与控制技术研究所宋爱国教授团队,其中的带队“师兄”,是已经入职中国科学院苏州医工所的青年博士后胡旭晖。值得一提的是,他也是此项项目得以成型的关键。

胡旭晖(左)与徐敏
相逢于微时
2019年,正师从东南大学教授宋爱国读博的胡旭晖成功研发出了自己职业生涯中的第一款“机械手”,并为此广泛征集、寻找受试者,希望得到残疾人同胞们的“一手反馈”。也是这时,早早因事故而失去右前臂的徐敏得以走进他的视野——
1992年,仅有17岁的徐敏在电扇厂里上班时,被60吨的液压冲床压断了右小臂,从此落下残疾,只能学着用左手练习吃饭、写字、搬东西……后来,徐敏所在的工厂因经营不善而倒闭,她又因为身有残疾在多次求职中反复受挫。于是,2003年,徐敏开始自主创业,做过房产中介也开过超市,多以失败告终。2008年,她又开起了饭店,生意因勤劳而风生水起。2017年,当交规被修订,放开了单侧手掌缺失残疾人的驾驶许可之后,徐敏马上就去考了一个C5驾照,虽然她只能驾驶经过专门机构改装过的车,但她从未因此而放弃完整生命体验的信念。
正所谓,自助者天助之。最终,苏州市残联为胡旭晖的“神奇”装置和徐敏牵了线。尽管这个叫胡旭晖的年轻男孩,在徐敏失去右前臂的时候都还未出生,但他却在徐敏之后的人生中给了她重新操纵“右手”的奇妙体验。
实验中的胡旭晖(左)与徐敏
二人相识于微,却成了彼此极为信任、相互扶持的科研合作伙伴。2022年,胡旭晖从东南大学毕业,去了中国科学院苏州生物医学工程技术研究所工作。在那里,他不断推进项目的进展,也继续和导师宋爱国教授合作,赓续人机交互机械手的研究。徐敏的右手也跟着换了又换。
胡旭晖说:“我当时正在设计攻关一款‘智能手’,这款‘智能手’可以初步实现正常手臂的作用,所以就不断邀请徐敏来试戴。为了让她戴得舒服,我多次调整了‘智能手’的细节。”而这款“智能手”的最终版使用了3D打印技术,连接假肢结构件与假肢接受腔的零部件通过3D打印可以使整个“手”的重量大大减轻,且能同步快速控制手和腕两个关节,得到了徐敏的高度赞赏。
从生活走向赛场
“参加全球辅助技术奥运会一直是我的目标,这项比赛在国际上很有影响力。”胡旭晖一直以来都不吝表达自己的信心与勇气,“一方面,我希望通过参加比赛向世界展示中国助残康复机器人领域的前沿成果,以及我国残疾人康复事业取得的成绩。另一方面,也能够通过对标全球助残康复最新技术和产品,去其糟粕、取其精华,进一步推动我国新一代康复产品的自主研发、推广运用和升级换代,造福更多残疾朋友。”
既然选择向前,风雨兼程便是常态。赛场不同于生活,对义肢灵活性与准确性的要求都大幅提升,尤其还是在残疾人控制义肢的信号源非常有限的环境中,确保手指、手腕的可靠运动更是重中之重。
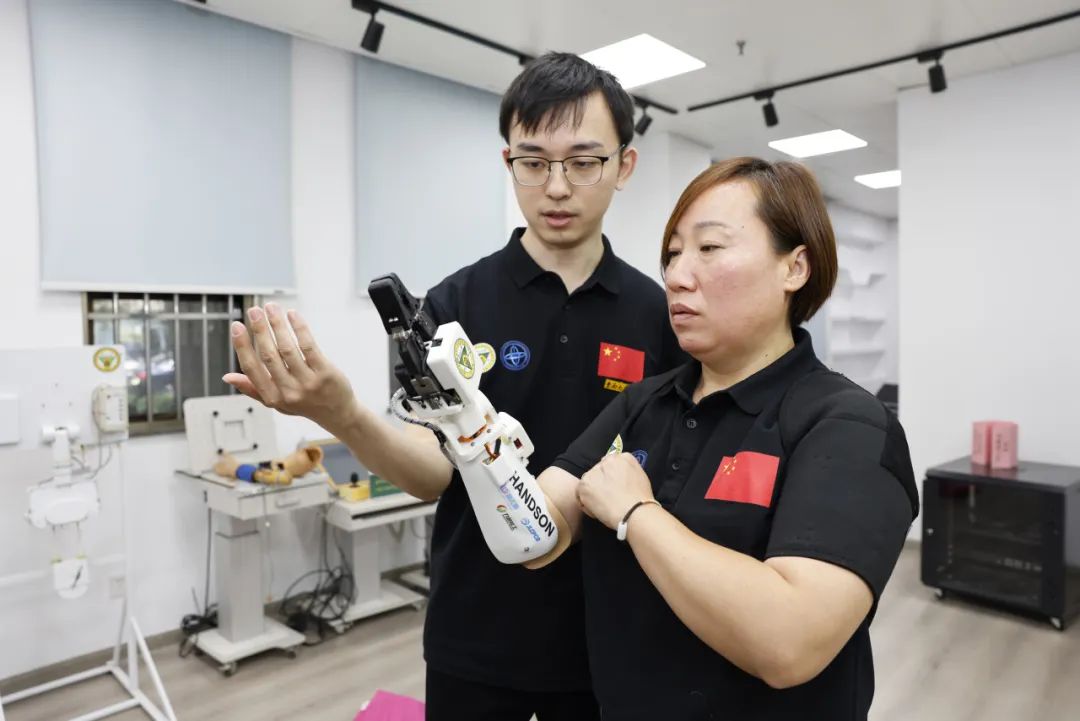
“所以,我们为徐敏量身定制了穿戴式肩带,肩带内配有拉伸传感器,可以监测徐敏弓背时的肩膀运动状态。传感器通过监测肩部位移信号,与残肢端获取的肌电信号协同,控制手指的开合角度以及手腕关节的旋转角度。弓背角度越大,肩部的位移量就越大,手指开合度也越大。反之亦然。”胡旭晖介绍道。
比赛中,选手要抓取的物体、完成的动作差异很大,有时要能精细地拧灯泡、反转手腕摞杯子,有时又要能提矿泉水瓶、握榔头、拎水壶。那么,“如何控制此间力道”又成了问题。对此,宋爱国教授回应道:“团队在义肢的手指上植入了力触觉传感器,用它来检测抓取物体时,义肢抓取力的大小和力的分布,可以通过震动刺激将信号传给手臂。如果抓取力越大,震动刺激就越强烈,选手就可以根据震动强度,决定要施加多大的力。”

徐敏的夺冠“机械手”
“同时,我们在义肢手指上设置了4个不同的抓取区。第一个功能区做得尽量水平,以便抓取纸片、药匙这些平直物体;第二个功能区做成内嵌的圆弧状,以便能握住榔头、瓶子等物质;第三个功能区做成半球面,可以抓珠子等圆形物体;第四个功能区设置在手指的两个关节处,便于做拎水壶等负重动作时固定物体位置。”胡旭晖适时补充。
当然,各种细节是很难面面俱到的,比如,为了让义肢穿过遮挡的毛刷,在肉眼看不见物体的情况下“开盲盒”。团队在义肢手指中安装了摄像头充当“眼睛”,通过视觉识别技术将捕捉到的图像信号转化为光信号辅助徐敏完成抓取。透过赛场上凝神屏息的分秒倒数,徐敏成了所有参赛团队中唯一完成相应任务的选手。诸如此类的例子不胜枚举,这既体现了胡旭晖团队的别出心裁与细心周全,更是他们对科技助残事业发自心底的热爱使然。
未来仍远,属于他们的科研生涯才刚刚开始,但他们眼中的道路却已然清晰光明。“要以满足人的实际需求为出发点开展科研”,这是他们共同的导师宋爱国教授的殷殷教诲,也是深埋于胡旭晖心中历久弥新的职业座右铭。
以上内容由办公区教程网摘抄自中国科普网可供大家参考!
相关文章

